The Internals of Go Channels
Recently I have been reading about the design of the Go language and this post is an accumulation of notes specific to the buffered channels and how they work.
If you want to understand what a channel in go is, please refer to this article [1]. After this point, I assume that we have a basic understanding of a go channel, that being said, let’s now dive in!
Making a go channel
Before we dive into how go channels are made, let’s see what they look like under the hood.
Sneak peek at the “hchan” struct
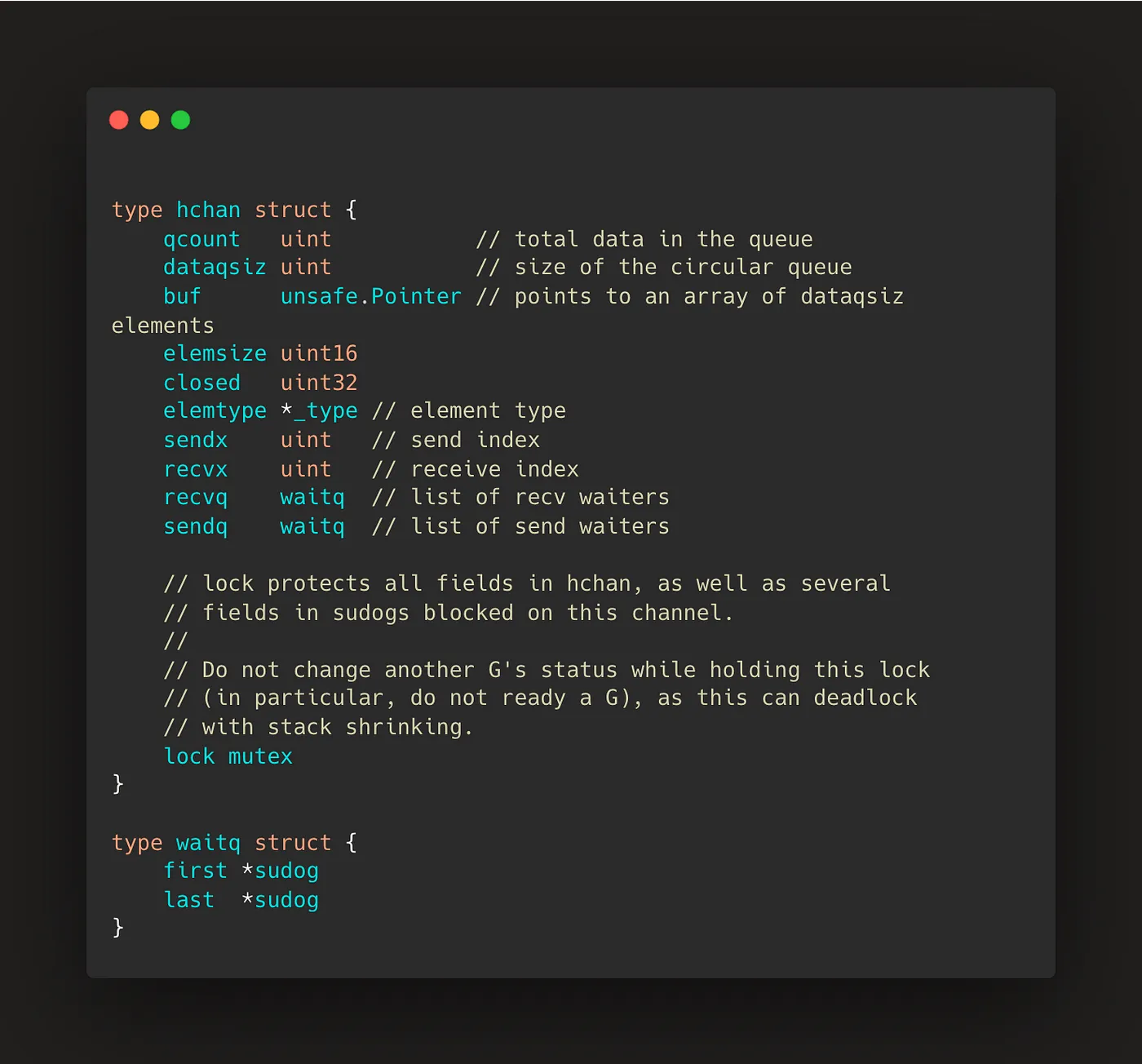
The above snippet is from go/src/runtime/chan.go , the file which contains the implementation of go channels. The hchan struct is the one which stores all the information about a particular channel.
hchan has an element buf that stores data as a circular queue. sendx is the index in which goroutines will push the next element while recvx is the index from where the next element will be taken from.
An important thing to note here is that the lock not only protects the fields in hchanbut also protects the fields of the goroutines (sudog) blocked in the channels.
Now that we understand the basic structure of a channel, let’s take a look at how they are initialized.
The makechan function
// go/src/runtime/chan.go
func makechan(t *chantype, size int) *hchan {
elem := t.elem
// compiler checks this but be safe.
if elem.size >= 1<<16 {
throw("makechan: invalid channel element type")
}
if hchanSize%maxAlign != 0 || elem.align > maxAlign {
throw("makechan: bad alignment")
}
mem, overflow := math.MulUintptr(elem.size, uintptr(size))
if overflow || mem > maxAlloc-hchanSize || size < 0 {
panic(plainError("makechan: size out of range"))
}
// Hchan does not contain pointers interesting for GC when elements stored in buf do not contain pointers.
// buf points into the same allocation, elemtype is persistent.
// SudoG's are referenced from their owning thread so they can't be collected.
// TODO(dvyukov,rlh): Rethink when collector can move allocated objects.
var c *hchan
switch {
case mem == 0:
// Queue or element size is zero.
c = (*hchan)(mallocgc(hchanSize, nil, true))
// Race detector uses this location for synchronization.
c.buf = c.raceaddr()
case elem.ptrdata == 0:
// Elements do not contain pointers.
// Allocate hchan and buf in one call.
c = (*hchan)(mallocgc(hchanSize+mem, nil, true))
c.buf = add(unsafe.Pointer(c), hchanSize)
default:
// Elements contain pointers.
c = new(hchan)
c.buf = mallocgc(mem, elem, true)
}
c.elemsize = uint16(elem.size)
c.elemtype = elem
c.dataqsiz = uint(size)
lockInit(&c.lock, lockRankHchan)
if debugChan {
print("makechan: chan=", c, "; elemsize=", elem.size, "; dataqsiz=", size, "\n")
}
return c
}
Here, makechanfunction initializes a hchan struct calculates the size of the buffer needed according to the element being stored, and eventually returns a pointer to the struct (*hchan).
I’ll be honest here, I am not very sure what the bad alignment validation is all about, diving a little deeper shows that it’s about memory validation and type alignment in go, couple of topics which I am not very sure about. Probably next blog post will be about that? 😄
Sending an element to the channel
Now, let’s talk about how a goroutine (g1) pushes an element in the channel.
Channel sends are handled by chansend
func chansend(c *hchan, ep unsafe.Pointer, block bool, callerpc uintptr) bool {
if c == nil {
if !block {
return false
}
gopark(nil, nil, waitReasonChanSendNilChan, traceEvGoStop, 2)
throw("unreachable")
}
if debugChan {
print("chansend: chan=", c, "\n")
}
if raceenabled {
racereadpc(c.raceaddr(), callerpc, abi.FuncPCABIInternal(chansend))
}
// Fast path: check for failed non-blocking operation without acquiring the lock.
//
// After observing that the channel is not closed, we observe that the channel is
// not ready for sending. Each of these observations is a single word-sized read
// (first c.closed and second full()).
// Because a closed channel cannot transition from 'ready for sending' to
// 'not ready for sending', even if the channel is closed between the two observations,
// they imply a moment between the two when the channel was both not yet closed
// and not ready for sending. We behave as if we observed the channel at that moment,
// and report that the send cannot proceed.
//
// It is okay if the reads are reordered here: if we observe that the channel is not
// ready for sending and then observe that it is not closed, that implies that the
// channel wasn't closed during the first observation. However, nothing here
// guarantees forward progress. We rely on the side effects of lock release in
// chanrecv() and closechan() to update this thread's view of c.closed and full().
if !block && c.closed == 0 && full(c) {
return false
}
...
}
If the send on the channel is not blocking and the channel is full, it just returns a false or, if the channel is closed, it’ll throw an error saying send on closed channel
func chansend(c *hchan, ep unsafe.Pointer, block bool, callerpc uintptr) bool {
...
if sg := c.recvq.dequeue(); sg != nil {
// Found a waiting receiver. We pass the value we want to send
// directly to the receiver, bypassing the channel buffer (if any).
send(c, sg, ep, func() { unlock(&c.lock) }, 3)
return true
}
...
}
Otherwise, it will first check whether the channel has any waiting receiver goroutine (g2), if yes, g1 will directly send data to g2’s stack! (It also implies that the channel was already empty, we’ll discuss this direct copy more in detail)
func chansend(c *hchan, ep unsafe.Pointer, block bool, callerpc uintptr) bool {
...
if c.qcount < c.dataqsiz {
// Space is available in the channel buffer. Enqueue the element to send.
qp := chanbuf(c, c.sendx)
if raceenabled {
racenotify(c, c.sendx, nil)
}
typedmemmove(c.elemtype, qp, ep)
c.sendx++
if c.sendx == c.dataqsiz {
c.sendx = 0
}
c.qcount++
unlock(&c.lock)
return true
}
...
}
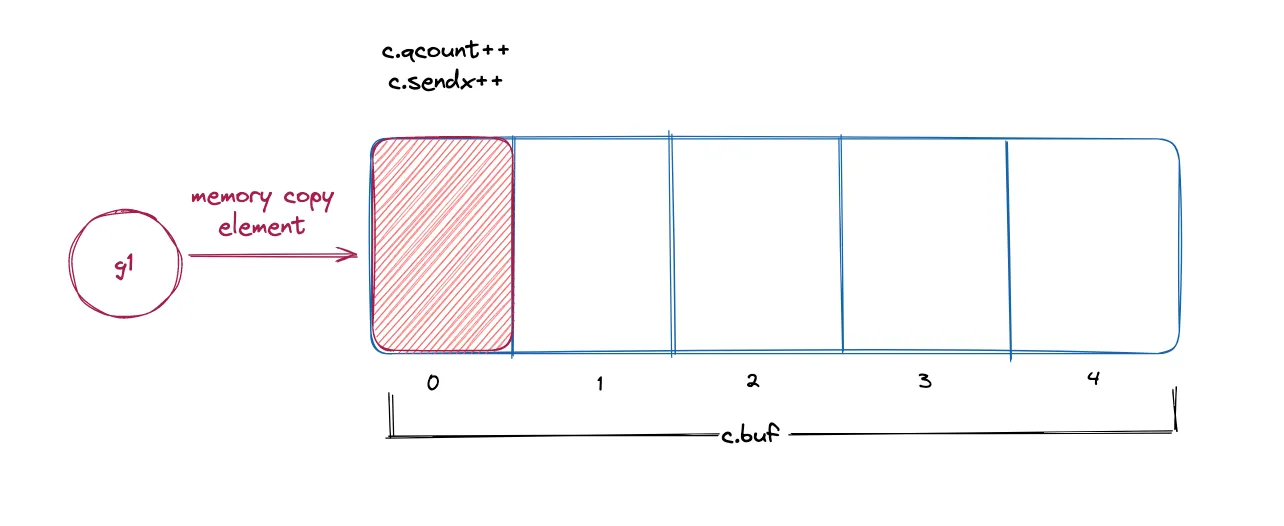
Let’s say there was no waiting goroutine(g2), then we check whether there is space available in the channel buffer, if it is, we copy the element in buffer memory and increment the sendx and qcount while unlocking the channel!
But… what will happen if there was no space left in the channel’s buffer? Here, two situations can happen.
func chansend(c *hchan, ep unsafe.Pointer, block bool, callerpc uintptr) bool {
...
if !block {
unlock(&c.lock)
return false
}
// Block on the channel. Some receiver will complete our operation for us.
gp := getg()
mysg := acquireSudog()
mysg.releasetime = 0
if t0 != 0 {
mysg.releasetime = -1
}
// No stack splits between assigning elem and enqueuing mysg
// on gp.waiting where copystack can find it.
mysg.elem = ep
mysg.waitlink = nil
mysg.g = gp
mysg.isSelect = false
mysg.c = c
gp.waiting = mysg
gp.param = nil
c.sendq.enqueue(mysg)
// Signal to anyone trying to shrink our stack that we're about
// to park on a channel. The window between when this G's status
// changes and when we set gp.activeStackChans is not safe for
// stack shrinking.
gp.parkingOnChan.Store(true)
gopark(chanparkcommit, unsafe.Pointer(&c.lock), waitReasonChanSend, traceEvGoBlockSend, 2)
// Ensure the value being sent is kept alive until the
// receiver copies it out. The sudog has a pointer to the
// stack object, but sudogs aren't considered as roots of the
// stack tracer.
KeepAlive(ep)
// someone woke us up.
if mysg != gp.waiting {
throw("G waiting list is corrupted")
}
gp.waiting = nil
gp.activeStackChans = false
closed := !mysg.success
gp.param = nil
if mysg.releasetime > 0 {
blockevent(mysg.releasetime-t0, 2)
}
mysg.c = nil
releaseSudog(mysg)
if closed {
if c.closed == 0 {
throw("chansend: spurious wakeup")
}
panic(plainError("send on closed channel"))
}
return true
}
If it were a non-blocking send call, we’ll move out of the send function, if not, then we enqueue this sender (g1) to the channel’s sendq and ask the go runtime scheduler to pause g1.
The sudog here is a struct which holds information for a waiting goroutine (in our case, g1). Go runtime is going to park this sending goroutine (g1), and according to comments, we are ensuring that
- g1’s stack should not shrink — (understand more about stack growth and shrinking from this video[4])
- Ensure that the value which g1 was going to send is kept alive until receiver (g2) copies out of it.
When a receiver goroutine (g2) comes along and wakes us up, we finally release the sudog and check if the channel was closed or not once again. If it was, throw an error, else return true!
Now, what was that direct send thing again?
In an empty-buffered / unbuffered channel, when g2 is already present in recvq , go allows the g1 to directly copy the element in receiving g2’s stack.
The Go GC assumes that stack writes only happen when g1 is running and is only done by it.
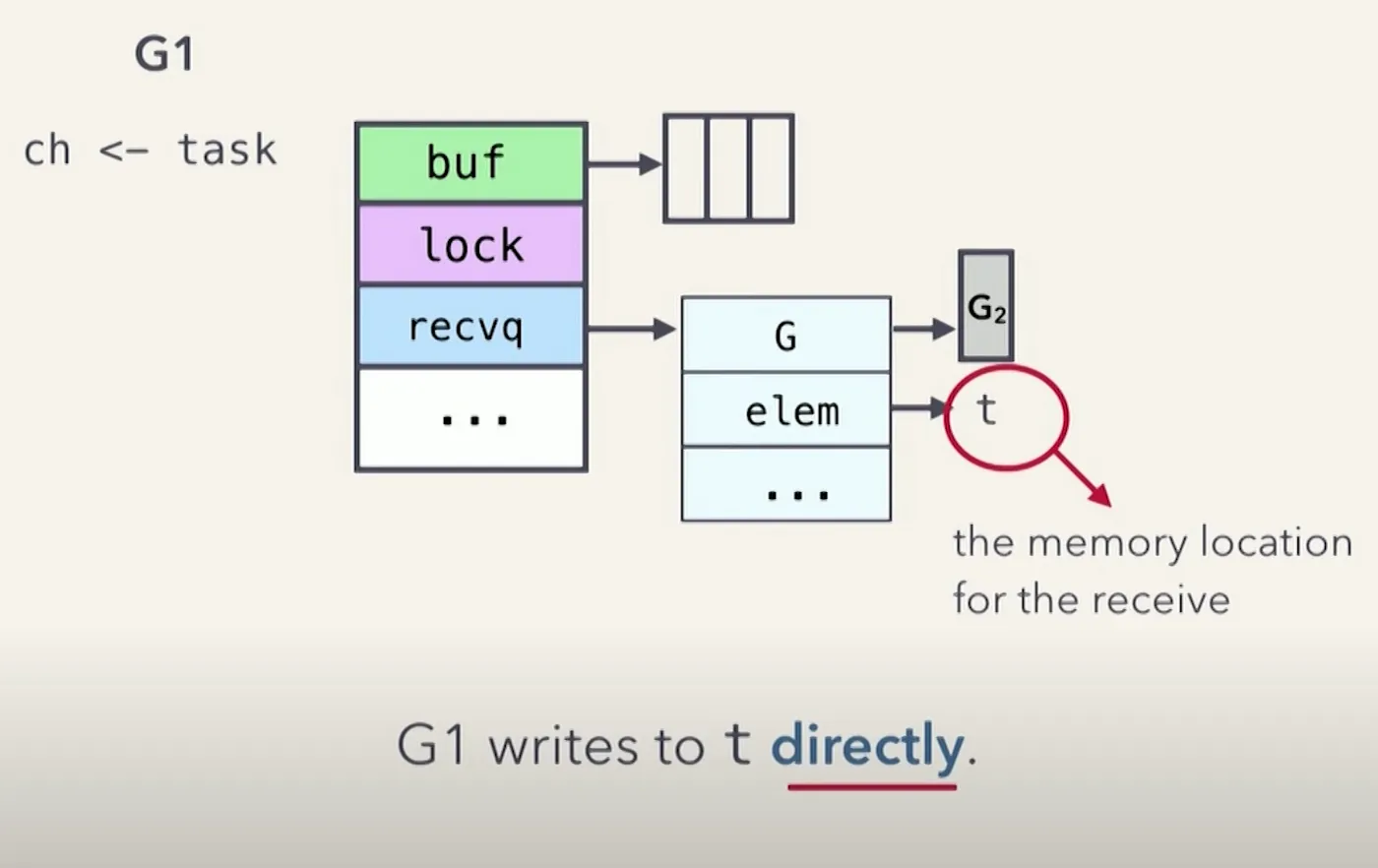
A thing to note is that a write barrier is established before the element is copied to the stack of receiving goroutine. This saves one memory copy operation! The actual implementation of memmove can be found here — CPP Reference[5]
Receiving an element from the channel
As the title suggests, here we need to understand how a goroutine receives an element from the channel. following earlier conventions, the receiver goroutine will be g2, and sending goroutine will be g1.
Receives are handled by chanrecv and the docstring has beautifully explained its role, so I am just going to state that here —
chanrecv receives on channel c and writes the received data to ep. ep may be nil, in which case received data is ignored. If block == false and no elements are available, returns (false, false). Otherwise, if c is closed, zeros ep** and returns (true, false). Otherwise, fills in **ep with an element and returns (true, true). A non-nil ep must point to the heap or the caller’s stack.
func chanrecv(c *hchan, ep unsafe.Pointer, block bool) (selected, received bool) {
...
if c.qcount > 0 {
// Receive directly from queue
qp := chanbuf(c, c.recvx)
if raceenabled {
racenotify(c, c.recvx, nil)
}
if ep != nil {
typedmemmove(c.elemtype, ep, qp)
}
typedmemclr(c.elemtype, qp)
c.recvx++
if c.recvx == c.dataqsiz {
c.recvx = 0
}
c.qcount--
unlock(&c.lock)
return true, true
}
...
}
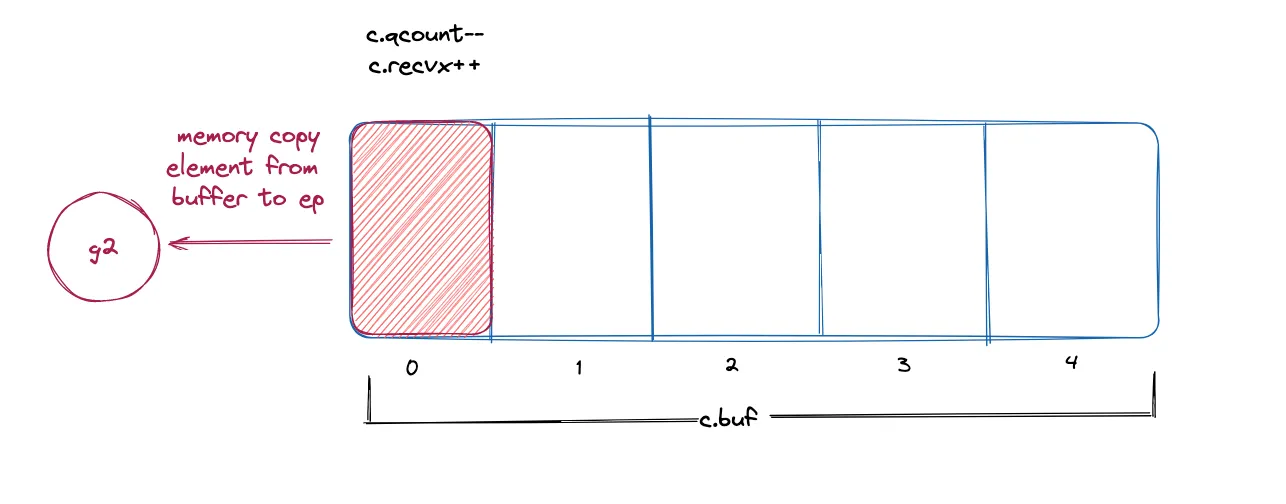
Pretty standard circular queue operations again, after certain validations and checking if there is no g1 already in sendq , it checks whether there is any element in the channel or not. If there is an element, the channel copies it to ep and recvx is incremented while qcount is decrement and the channel is unlocked.
If there was a g1 already present in sendq, g2 will initiate a direct receive to ep if the buffer is empty, just like a direct send was done, otherwise, g2 will take the element from the head of the buffer and copy the element from g1’s stack to the tail of the channel buffer and unpark g1.(i.e., set g1 back to runnable)
// The portion responsible to initiate the 2 phase receive
func recv(c *hchan, sg *sudog, ep unsafe.Pointer, unlockf func(), skip int) {
if c.dataqsiz == 0 {
if raceenabled {
racesync(c, sg)
}
if ep != nil {
// copy data from sender
recvDirect(c.elemtype, sg, ep)
}
} else {
// Queue is full. Take the item at the
// head of the queue. Make the sender enqueue
// its item at the tail of the queue. Since the
// queue is full, those are both the same slot.
qp := chanbuf(c, c.recvx)
if raceenabled {
racenotify(c, c.recvx, nil)
racenotify(c, c.recvx, sg)
}
// copy data from queue to receiver
if ep != nil {
typedmemmove(c.elemtype, ep, qp)
}
// copy data from sender to queue
typedmemmove(c.elemtype, qp, sg.elem)
c.recvx++
if c.recvx == c.dataqsiz {
c.recvx = 0
}
c.sendx = c.recvx // c.sendx = (c.sendx+1) % c.dataqsiz
}
sg.elem = nil
gp := sg.g
unlockf()
gp.param = unsafe.Pointer(sg)
sg.success = true
if sg.releasetime != 0 {
sg.releasetime = cputicks()
}
goready(gp, skip+1)
}
Why? So that g1 does not have to acquire the channel’s lock again and copy the element to buffer itself, hence saving some CPU cycles. Brilliant IMO!
Lastly, if there is no element to receive from the channel, the channel will either unlock itself and return true; or park g2 and enqueue it recvq until a sender (g1) comes along and wakes g2 up.
Conclusion
Hopefully, with the aid of these notes and accompanying illustrations, I managed to demystify how channels internally work in Go.
I have come to love the small tweaks and optimizations which Go-engineers have done in such a simple data structure to save a few CPU cycles and ensure memory safety like the direct sends & receives, memcpy and I hope I illustrated them well enough for you to appreciate them as well :D
Resources
- [1] Go Channels — https://gobyexample.com/channels
- [2] GopherCon 2017: Kavya Joshi — Understanding Channels
- [3] Memory Layout in Go
- [4] Go scheduler: Implementing language with lightweight concurrency
- [5] CPP Reference — memmove_.s